A dynamic positioning vessel typically requires a specific number of thrusters to ensure effective positioning and maneuverability. The number of thrusters is determined based on several factors, including the vessel's size, shape, intended operations, and environmental conditions.
The number of thrusters is determined based on the total thrust required to maintain the vessel's position in different environmental conditions. By distributing the thrust among multiple thrusters, the vessel can achieve the necessary force to counteract external forces effectively. This helps prevent excessive wear and tear on thrusters, extends their lifespan, and reduces maintenance requirements.
Thruster types of dynamic positioning vessels are:
Main propellers and rudders. Such thrusters are also called “main engines” and, depending on the kind of propeller, there are two types of them: Controllable-Pitch Propeller (CPP) and Fixed-Pitch Propeller (FPP). The difference between these two types is that the blades of the Controllable-Pitch Propeller are able to change the pitch angle (to turn). Thus, the change of the produced thrust is achieved by altering the blade direction (changing the angle of attack of the propeller blades). When the thrust is not required, blades are set to zero pitch and turned to one plane
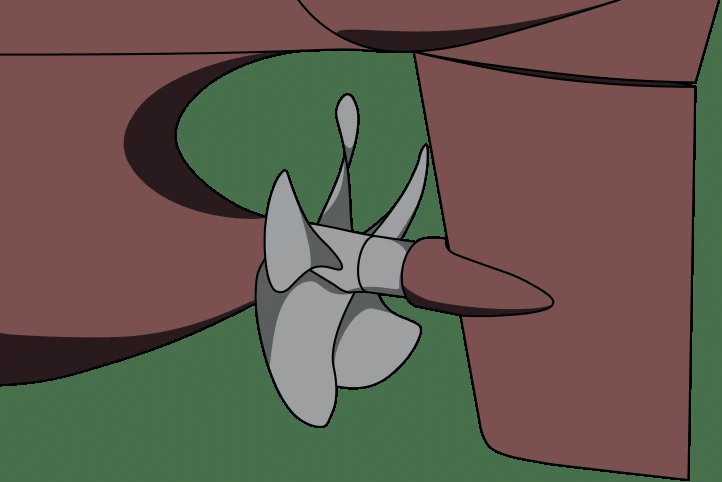
Advantage of the Controllable - Pitch Propeller is that it is possible to keep the engine at the constant revolutions during maneuvers and there is no need for reversing the engine – in order to develop thrust astern, the direction of the blades is just changed accordingly. Fixed-Pitch Propeller, however, lacks such an option, as its blades do not change the angle of attack (the propeller is solid) and the thrust force can be controlled by increasing or decreasing revolutions per minute (RPM) only, while the engine is working at variable RPMs.
Characteristics, discussed above, are applied to all thrusters, where propeller is used. When the thrusters are controlled by the DP system, then DP system defines and controls the blade pitch and rudder angle to be made for keeping the vessel in position.
In order to avoid affecting one thruster by another (on the vessels with two or more azimuth thrusters), DP operator can activate function “Prohibited Azimuth Zone”. Pivoting 360°, azimuth thruster does not enter a particular sector. Prohibited sectors are usually set in the direction of the other thruster, so that they do not create the wash against each other, or in the direction of hydroacoustic systems (echosounder, HPR) to prevent interference.
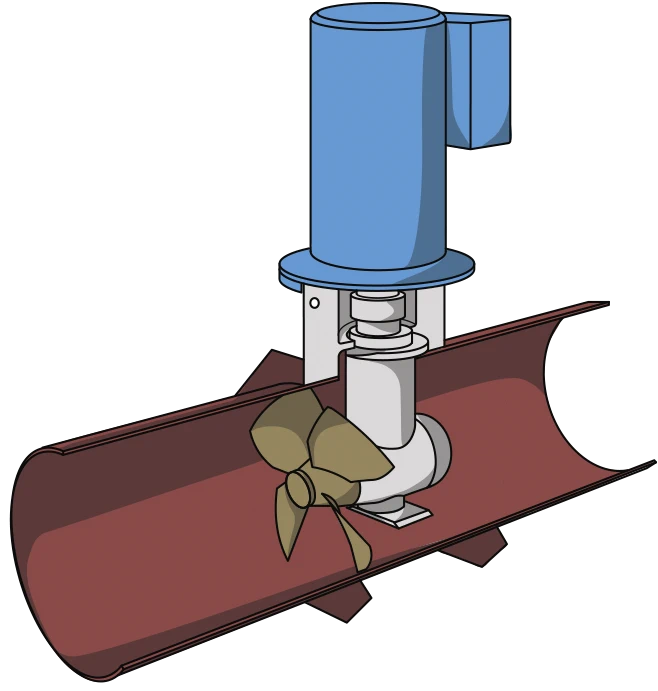
Retractable azimuth thruster - such a thruster is hidden in the hull of the vessel during her passage and is retracted when it is necessary to improve her maneuverability (berthing) or to improve ability of the vessel to keep her position (DP operation). One shall remember that when this thruster is active, the draught of the vessel is increased by its length – particular caution is required in shallow waters and ports.
Azipod – is a variation of the azimuth thruster, with its electrical motor being mounted in the thruster itself (in the pod) and a propeller, connected directly to its shaft.

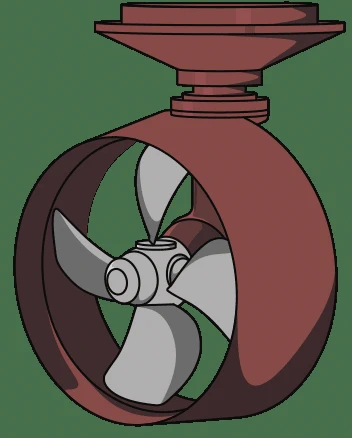
Tunnel thrusters can be fitted in forward and aft part of the vessel. It is quite simple and reliable equipment. The tunnel of the thruster is located athwartships with the propeller inside – it can be either a controllable-pitch or a fixed-pitch one with the same characteristics and principles, intrinsic to already mentioned propellers.
Tunnel thrusters are rather effective in maneuvering at a slow speed and position keeping, as they develop the side thrust. However, these thrusters lose their efficiency at the speed higher than 3 knots and pitching.
Waterjet and Gill jet thruster – belongs to a waterjet type of thrusters, where the propeller functions as a pump injecting the water to the channel through a pipe, located in the bottom part of the vessel’s hull.
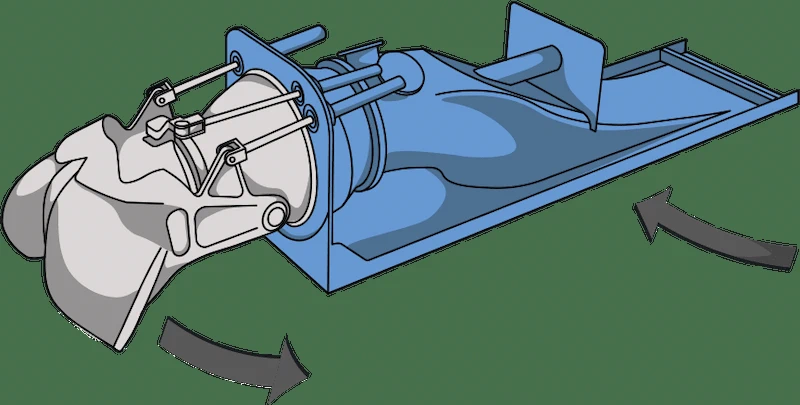
Voith-Schneider thruster – is a laterally rotating cylinder with vertically installed and controllable blades, pivoting about their axis.
The first three types of thrusters, such as Main propellers and rudders, Azimuth thrusters, Tunnel thrusters are more common ones among those, described above. The regulations, however, do not contain any requirements as for the type of the thrusters to be fitted on board. They are the following:A dynamic positioning vessel typically requires a specific number of thrusters to ensure effective positioning and maneuverability. The number of thrusters is determined based on several factors, including the vessel's size, shape, intended operations, and environmental conditions.
For equipment classes 2 and 3, the thruster system should be connected to the power system in such a way that rule above can be complied with even after failure of one of the constituent power systems and the thrusters connected to that system.
It follows from these regulations that the DP system shall control three axes by means of thrusters: longitudinal, lateral and one for heading control – called surge, sway and yaw. Also, it can be concluded, that DP class 2 and DP class 3 vessels shall have at least four thrusters installed: two at the bow and two at the stern respectively.
src: estumar.com