
As the DP system is installed on board a vessel, there is a term ‘Dynamically positioned vessel” (DP vessel).
It shall be underlined that it is done by means of thrusters (i.e. propulsion system); not sails, oars or anchors – propulsion system only!
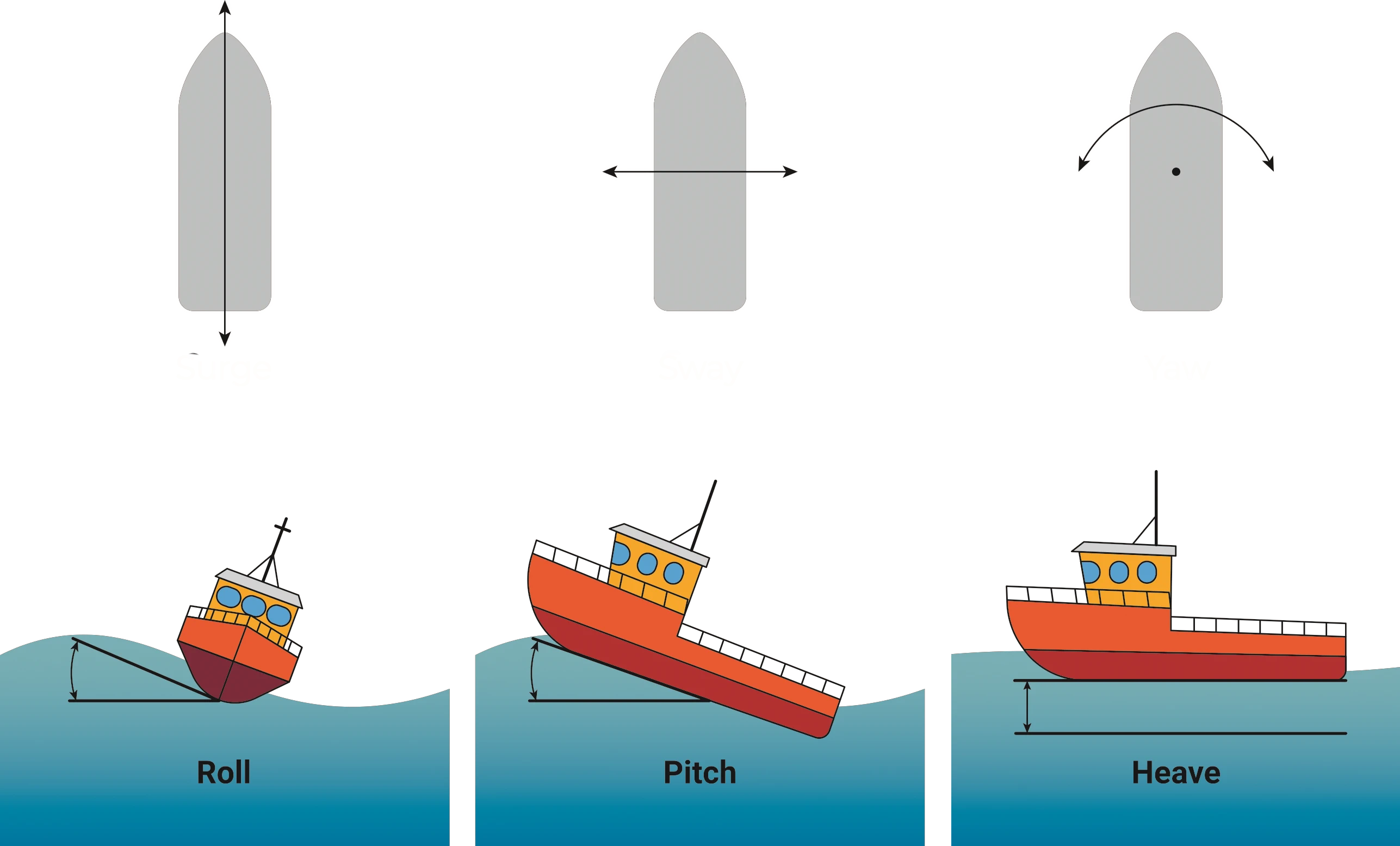
Wind, waves and current constantly affect a vessel, making her drift, turn around or heel. Thus, the vessel may have six axes of freedom: surge, sway, yaw, pitch, roll and heave. It is advisable to learn them at once, always remember and never confuse.
Surge – motion of a vessel back and forth.
Sway – sideways motion of a vessel to port or starboard.
Yaw – rotation of a vessel in horizontal plane, change of heading.
Pitch – the up/down movement of the bow and stern of a vessel.
Roll – port-starboard tilting motion of a vessel.
Heave – vertical motion of a vessel up and down.
The DP system is able to control only tree axes: surge, sway and yaw – it will be referred as positioning. For this the system needs to obtain value of the forces influencing the vessel, her present position coordinates and heading. At this stage sensors and position reference systems are involved. Gyrocompasses feed data about the vessel’s heading to the DP system. One of the environmental forces which is possible to measure is the wind force. Influence of the waves and current is calculated by the mathematical modelling of the DP system and is called DP Current.
Position Reference System (PRS) provides the DP system with the data on vessel’s position coordinates. There are usually two or more PRSs, that is why their data is fed into one point, called Centre of Rotation. However, during the rough sea, antenna or scanning unit of PRS heels along with the vessel, continuously indicating data of its position on the coordinate system. In order to correct data input from the reference systems, the DP system requires measurements of vessel’s Roll and Pitch. Vertical Reference Sensor (VRS) measures Roll and Pitch angular values and feeds this data to the DP system.
To summarize, Dynamic Positioning – is an automatic position and heading keeping by means of vessel’s propulsion system (thrusters). The word heading shall be emphasized, as the word positioning is associated with the meaning “position” – i.e. latitude and longitude. Within the context of DP, Auto Position (AutoPos) – is maintaining both position and heading of the vessel.
src: estumar.com